- 8 800 333-63-50Звонок из регионов бесплатный
- semicond@ptelectronics.ru
- Задать вопрос
- Заказать образцы
 отправка...
отправка...Назад
TESEO III – семейство микросхем от компании STMicroelectronics
Авторы статьи
(Опубликовано в журнале «Вестник Электроники» №4 2016)
Скачать статью в формате PDF (345 КБ)
Одним из лидеров по выпуску микросхем для навигационных систем по праву считается компания STMicroelectronics. В статье мы подробнее остановимся на микросхемах семейства Teseo III, являющихся последним пополнением навигационной линейки этого производителя.
Компания STMicroelectronics выпускает три семейства микросхем для навигационных систем: Teseo, Teseo II и Teseo III (рис. 1).
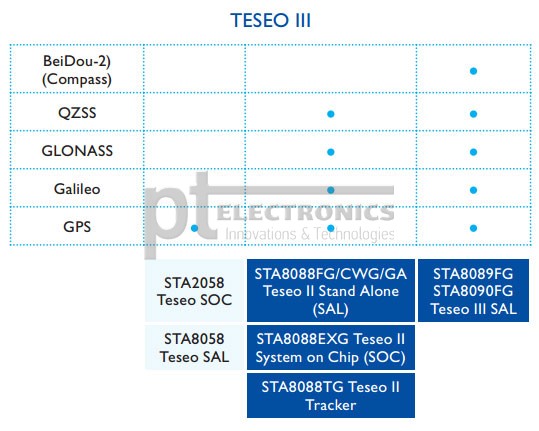
Рис. 1. Навигационные микросхемы компании STMicroelectronics
Как уже было упомянуто, мы рассмотрим последнее семейство — Teseo III. Эти микросхемы позволяют одновременно следить за 48 спутниками любой из навигационных систем ГЛОНАСС/GPS/Galileo/BeiDou/QZSS и имеют все необходимые инструменты для создания систем позиционирования.
Используя микросхемы Teseo III, можно получить систему со следующими параметрами:
- Cold Start Time to First Fix — всего 35 с (Cold Start Sensitivity — 145 дБм). Это один из самых важных параметров, поскольку таково время устойчивого определения спутниковых сигналов при запуске системы;
- Warm Start Time to First Fix — 34 с (Warm Start Sensitivity — 145 дБм). Параметр характеризует время определения местоположения при включении системы, если она использовалась недавно и местоположение изменилось незначительно (не более 100 км);
- Hot Start Time to First Fix — 1 с (Hot Start Sensitivity — 155 дБм). Это время так называемого горячего старта: если система используется, но по каким-то причинам потеряла сигналы от спутников (например, под мостом или в тоннеле);
- Position Accuracy — 1,5 м (точность определения координат);
- Tracking Sensitivity — 162 дБм (уровень сигнала, необходимый для позиционирования системы).
Следует также упомянуть, что чипы Teseo III поддерживают Autonomous AGPS — технологию, ускоряющую определение местоположения при холодном старте (Cold Start Time to First Fix). Для алгоритмов AGPS обычно необходима связь с сервером, но архитектура Teseo III позволяет использовать эту функцию и без подключения к серверу.
На рис. 2 представлена структурная схема микросхем STA8089/90 Teseo III.
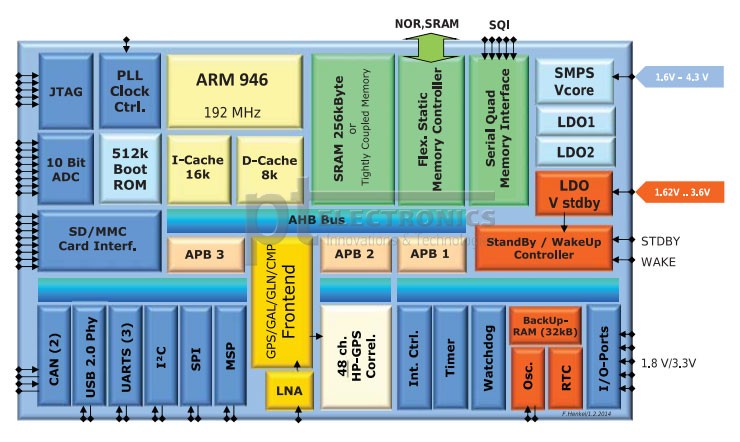
Рис. 2. Структурная схема микросхем STA8089/90 Teseo III
Основные характеристики решения на основе Teseo III:
- 48 каналов слежения за спутниками и два канала быстрого определения положения с поддержкой систем GPS, Galileo, Glonass, BeiDou и QZSS;
- на одном кристалле расположены малошумящий усилитель и высокочастотные узлы;
- чувствительность внутри помещения: 162 дБм (в режиме слежения);
- время до первого местоопределения (TTFF) не более 1 с при горячем старте и 30 с при холодном;
- высокопроизводительное микропроцессорное ядро ARM946 (тактовая частота до 196 МГц);
- 256 кбайт SRAM;
- встроенная SQI flash-память объемом 2 или 4 Mбайт (только для STA8089FG и STA8090FG);
- встроенные часы реального времени;
- 32-битный сторожевой таймер;
- до трех последовательных интерфейсов UART;
- I2C-интерфейс с поддержкой режимов Master и Slave;
- синхронный последовательный интерфейс (SSP, с поддержкой режима Motorola-SPI);
- USB 2.0 Full speed с интегрированным физическим уровнем;
- два CAN-контроллера;
- двухканальный 10-разрядный АЦП;
- порты ввода/вывода GPIO;
- встроенный импульсный модуль управления питанием (только для STA8090FG);
- диапазон рабочих температур: –40…+85 °C;
- корпуса VFQFPN56 (770,85 мм) для STA8089GA и TFBGA99 (561,2 мм) для STA8090FG;
- требования по питанию:
- основной (Vinl) и резервный (Vinb) регулятор: 1,6–4,3 В;
- питание цифровой части (Vdd): 1,2 В ±10%;
- питание высокочастотных узлов (Vcc): 1,2 В ±10%;
- питание цепей ввода/вывода (Vddio): 1,8 В ±5% или 3,3 В ±10%.
Как видно на рис. 2, микросхемы Teseo III, по сути дела, представляют собой довольно мощный микроконтроллер со встроенными элементами определения местоположения. Это означает, что при создании продукта разработчик может использовать свободные ресурсы микроконтроллера под прикладные нужды, а не ставить внешний процессор или, скажем, АЦП. На минимальной скорости ядра порядка 50 МГц остается приблизительно 30% свободного машинного времени, а на максимальной скорости 196 МГц и того больше — 70%. Кроме того, около 60 кбайт RAM остается свободно для задач, не связанных с навигацией.
Пример построения несложной навигационной системы на Teseo III по-казан на рис. 3.
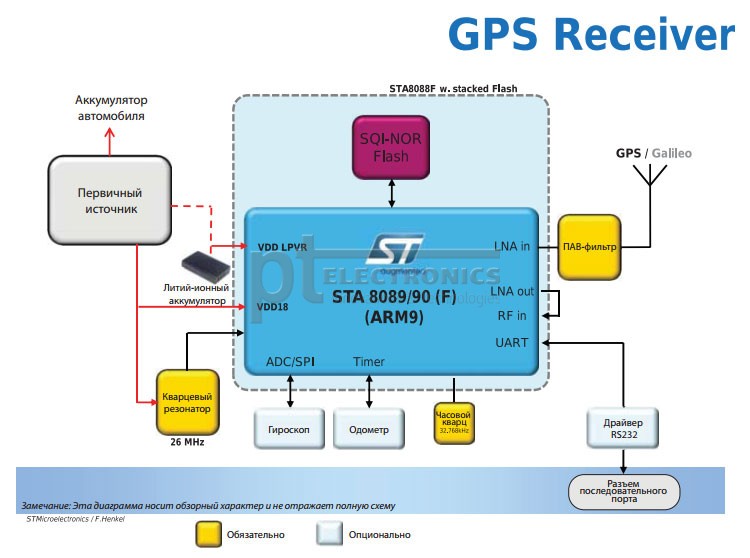
Рис. 3. Пример построения навигационной системы на основе Teseo III
Dead Reckoning
Как было сказано выше, одним из основных преимуществ семейства Teseo III является то, что для точного позиционирования можно использовать сигналы большинства навигационных систем (GPS/Galileo/Glonass/BeiDou2/QZSS).
Но бывают ситуации, когда сигналы от навигационных систем (GNSS) вооб-ще отсутствуют, например, в районах, где существует большая плотность высотных домов, или в тоннеле, — a измерение скорости и движение по проложенному маршруту необходимо продолжать. Для решения этой непростой задачи в семействе Teseo III предусмотрена еще одна интересная функция — Dead Reckoning (DR), которая позволяет применить в навигационных вычислениях сигналы с интегральных датчиков линейного ускорения (MEMS Accelerometer) и угловой скорости (MEMS Gyroscope), а также сигнал скорости автомобиля ODO. С помощью трехосевого гироскопа система способна вычислить маршрут не только по прямой дороге, но и при движении вверх или вниз по многоуровневому паркингу или дорожной развязке.
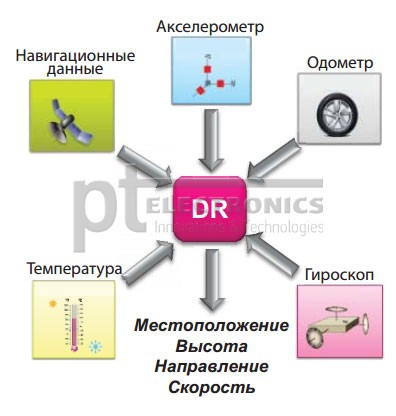
Рис. 4. Функционал системы Dead Reckoning
Мультисенсор Dead Reckoning (MSDR) генерирует точные отсчеты положения, направления, высоты и скорости посредством слияния GNSS и информации от датчиков (рис. 4).
В Teseo III встроены два контроллера CAN-шины. Данные, полученные по CAN-шине от автомобиля, существенно улучшают качество навигации благодаря информации о текущих значениях скорости, пробега, угла поворота передних колес, движения задних колес, ABS и т. д.
Кроме перечисленных возможностей, Dead Reckoning содержит еще ряд инновационных функций:
- автоматическая температурная компенсация (ATC) — эта функция автоматически компенсирует дрейф температуры каждого датчика, гарантируя точность даже при отсутствии сигналов от навигационных систем;
- автоматическая свободная установка (AFM) — автоматически компенсирует угол наклона печатной платы (±45° макс.), что гарантирует высокую производительность решения навигационной задачи независимо от того, насколько точно установлено устройство в автомобиле;
- Sensor over UART (SOA) — позволяет Teseo III принимать сигналы от инерционных датчиков с помощью UART. Это повышает гибкость архитектур на основе хост-клиента;
- 3D-DR (3DR) — обеспечивает индикацию изменения положения в вертикальном направлении даже при отсутствии сигналов от навигационной системы.
Автоматическая температурная компенсация (ATC) — запатентованный алгоритм компании ST, реализованный в семействе Teseo III, соединяет измерения от навигационных систем и температурного датчика. Испытания показали, что автоматическая температурная компенсация значительно увеличивает точность системы, где недоступны сигналы от навигационных систем. Например, в тоннеле точность возрастает почти на 90% по сравнению с системами без автоматической температурной компенсации.
Автоматическая свободная установка (AFM) — также запатентованный алгоритм компании ST, реализованный в семействе Teseo III, который соединяет измерения от навигационных систем и акселерометра. Чувствительность MEMS-гироскопа по осям зависит от точности его установки в транспортное средство. Возможность автоматической калибровки углов установки навигационного блока в транспортном средстве значительно увеличивает общую точность навигационного решения.
Классические DR основаны на одной оси гироскопа и являются двухмерными (2D), их задача — вычисление положения пользователя в горизонтальной плоскости. 3DR — трехосевые твердотельные гироскопы — значительно расширяют возможности по вычислению движения пользователя в пространстве. Это позволяет рассчитывать время и расстояние при спуске или подъеме, а также учитывать состояние дорожного покрытия.
Все функции Dead Reckoning существенно улучшают обработку данных, делая позиционирование транспортного средства и вычисление траектории маршрута более точными и непрерывными. В стремительно развивающемся мире использование этой функции даст реальное конкурентное преимущество на рынке навигационных систем.
Заключение
Подведем краткий итог. Teseo III — это однокристальное семейство микросхем от компании STMicroelectronics для систем позиционирования с возможностью приема сигналов от различных навигационных систем, что позволяет определять местоположение с очень высокой точностью, а в случае потери сигнала система Dead Reckoning продолжит вычисление траектории маршрута. Микросхема Teseo III может быть использована в качестве основного микроконтроллера в целевом приложении, что снижает себестоимость и габариты разрабатываемых изделий.
Для облегчения труда программистов компания STMicroelectronics предоставляет программный набор разработчика SDK и пакет ПО для мультисенсорной навигации DRAW.
Для включения микросхем требуется минимум внешних вспомогательных элементов — это позволяет сократить сроки разработки и получать решения по конкурентной цене. За тот небольшой период, который выпускается Teseo III, микросхемы уже нашли широкое применение в автомобильных телематических системах и портативных трекерах.
