- 8 800 333-63-50Звонок из регионов бесплатный
- semicond@ptelectronics.ru
- Задать вопрос
- Заказать образцы
 отправка...
отправка...Назад
Устройство определения местоположения объекта: аналитический подход к выбору
Авторы статьи
- Сводная таблица параметров
Полезные ссылки
(Опубликовано в журнале «Вестник Электроники» №4 2014)
Скачать статью в формате PDF (199 КБ)
В статье рассматриваются параметры разного типа модулей, являющихся входными устройствами приемников информации от спутников систем ГЛОНАСС, GPS, Galileo и BeiDou. Предлагается аппарат для расчета эффективности работы модулей, позволяющий проектанту и пользователю выбрать оптимальный для решения требуемой навигационной задачи модуль из имеющихся на рынке.

Приведен расчет, по результату которого определен оптимальный из ряда выпускаемых отечественных и зарубежных модулей, проведен анализ полученного результата.
Введение
Одной из весьма актуальных задач является задача определения местоположения и скорости движения объектов: автомобилей, кораблей, метеозондов, путешествующего человека и пр. Эта задача решается путем создания ряда спутниковых систем, передающих необходимую информацию, и приемников этой информации. Получаемая приемником информация и алгоритмы ее обработки позволяют определить с необходимой точностью координаты объекта, в т. ч. высоту его расположения, скорость его движения, а также получить ряд других сведений.
Учитывая высокую потребность в таких устройствах, отечественные и зарубежные компании разрабатывают и выпускают большое количество приемников. Приемники, выпускаемые разными компаниями, различаются между собой параметрами, функциональными возможностями, ценой и т. д.
Основным элементом, в наибольшей степени определяющим качество приемника, является входной модуль, в котором происходит прием и основная обработка информации, полученной от спутников. Модули, так же как и приемники, разрабатываются разными организациями и также различаются как параметрами – техническими, конструктивными, экономическими, так и наличием сертификатов, лицензий, потребляемой мощностью и т. п. Соответственно, перед организациями, которые выпускают приемники, встает проблема выбора типа входного модуля с учетом всех его достоинств и недостатков.
Таким образом, модуль представляет собой устройство с большим количеством характеризующих его параметров и разветвленной схемотехнической структурой. Такое устройство относится к многопараметрической системе [1, 2]; соответственно, выбор оптимального типа модуля может быть осуществлен методами решения задач на основе системного подхода.
В настоящем сообщении дается краткая информация по решению навигационной задачи, рассматриваются базовые понятия аппарата расчета эффективности систем, приводятся показатели функционально-аналогичных модулей, методика и соотношения для расчета; проводится расчет эффективности работы каждого модуля и анализ полученных результатов.
Некоторые сведения о решении навигационной задачи
1.Общие сведения. Навигационные спутниковые системы (НСС) предназначены для оперативного навигационно-временного обеспечения неограниченного числа пользователей наземного, морского, воздушного и космического базирования и состоят из работающих в единой сети спутников Земли, вращающихся с определенной скоростью на разных орбитах. На борту каждого спутника находятся радиопередатчики, излучающие сигналы с определенной скважностью. Сигнал каждого спутника содержит данные псевдослучайного кода, эфемериса и альманаха.
Псевдослучайный код служит для идентификации передающего спутника, которые пронумерованы числами в интервале от 1 до 32.
Данные эфемериса, постоянно передаваемые каждым спутником, содержат информацию о состоянии спутника (рабочее или нерабочее), текущей дате и времени.
Данные альманаха содержат информацию о местоположении спутников; каждый из них передает альманах, содержащий параметры своей орбиты, а также всех других спутников системы.
Таким образом, каждый спутник передает сигнал, в котором содержится информация о номере спутника, местоположении его и других спутников системы и дате и времени передачи этой информации. Приемная навигационная аппаратура (ПНА) получает это сообщение и запоминает данные эфемериса и альманаха для дальнейшего использования; эта же информация используется для установки или коррекции часов приемника.
Для определения местоположения ПНА сравнивает время отправки сигнала со спутника со временем его получения на Земле. Эта разница во времени говорит приемнику о расстоянии до конкретного спутника. Полученная аналогичная информация от нескольких других спутников позволяет определить (триангулировать) свое местоположение.
Получив сигналы от трех спутников (допустимый минимум), ПНА определяет свою широту и долготу, что называется двумерной фиксацией. Если же спутников четыре или более, то ПНА может определить положение в 3-мерном пространстве, т. е. указать широту, долготу и высоту.
Постоянно отслеживая свое местоположение в течение некоторого времени, ПНА также может рассчитать скорость и направление движения, т. е. «наземную скорость» и «наземный курс».
Погрешности в работе НСС определяются несколькими факторами. Фактором, влияющим на точность, является геометрия спутников, от которых принимаются сигналы, т. е. их расположение относительно друг друга (при их близком взаимном расположении точность определения координат хуже). Сюда же относится и невозможность приема сигналов от тех или иных спутников при сложном рельефе местности, высоких зданиях и т. п. Следующим источником ошибок является переотражение спутникового сигнала от различных объектов, что возникает при взаимодействии сигнала со зданиями или рельефом местности до того, как он достигнет приемной антенны (сигналу требуется больше времени для достижения антенны, что адекватно большему, чем в реальности, расстоянию до спутника). В НСС GPS, кроме того, снижение точности определяет искусственно введенный МО США «избирательный доступ», что представляет собой преднамеренное уменьшение точности гражданских GPS-навигаторов – для того, чтобы противник (террористическая организация) не мог использовать максимальную точность GPS.
2.Навигационные спутниковые системы
2.1. Система GPS. Global Positioning System (GPS) – спутниковая навигационная система, состоящая из работающих в единой сети 24 спутников, находящихся на 6 орбитах высотой около 17 000 км над поверхностью Земли. Спутники постоянно движутся со скоростью около 3 км/с, совершая два полных оборота вокруг планеты менее чем за 24 часа (система GPS известна также под названием NAVSTAR).
Мощность радиопередатчика спутника – порядка 50 Вт, каждый спутник передает сигналы на 3 частотах – гражданские GPS-приемники используют частоту «L1», равную 1575,42 МГц, сообщение передается каждые 12,5 минуты.
Орбиты спутников располагаются примерно между 60 градусами северной и южной широты. Этим достигается то, что сигнал от хотя бы от некоторых спутников может приниматься повсеместно в любое время. Одним из важнейших преимуществ GPS перед существовавшими ранее наземными системами является всепогодность.
Спутники GPS пронумерованы числами в интервале от 1 до 32. Количество возможных номеров спутников (32) больше, чем число спутников (24), – для удобства обслуживания GPS-сети: новый спутник может быть запущен, проверен и введен в эксплуатацию еще до того, как старый выйдет из строя, этому спутнику будет присвоен новый номер в интервале от 1 до 32.
Обычные гражданские GPS-приемники обеспечивают точность от 12 до 70 м в зависимости от действующего на данный момент SA, количества видимых спутников и их геометрии (без специальной математической обработки).
Существуют также дополнительные (обычно достаточно дорогостоящие) возможности увеличения точности до одного метра и менее.
2.2. Система ГЛОНАСС. Глобальная Навигационная Спутниковая система (ГЛОНАСС, GLONASS) – российская спутниковая система навигации, состоящая из 24 спутников, движущихся над поверхностью Земли в трех орбитальных плоскостях с наклоном орбитальных плоскостей 64,8° и высотой 19 100 км. Принцип измерения аналогичен американской системе навигации GPS. Система ГЛОНАСС работает в диапазоне частот 1597,5–1605,9 МГц и определяет местонахождение объекта с точностью до 4,5 м; в дальнейшем предполагается увеличение точности до 2,5 и, далее, до 1 метра.
2.3. Система GALILEO. Галилео (Galileo) – совместный проект спутниковой системы навигации Европейского союза и Европейского космического агентства. Ожидается, что GALILEO войдет в строй в 2014–2016 годах, когда на орбиту будут выведены все 30 запланированных спутников (27 операционных и 3 резервных).
Спутники «Галилео» будут выводиться на орбиты высотой 23 222 км (или 29 600,318 км от центра Земли), проходя один виток за 14 ч 4 мин и 42 с и обращаясь в трех плоскостях, наклоненных под углом 56° к экватору, что обеспечит одновременную видимость из любой точки земного шара по крайней мере четырех аппаратов. Временная погрешность атомных часов, установленных на спутниках, составляет одну миллиардную долю секунды, что обеспечит точность определения места приемника около 30 см на низких широтах. За счет более высокой, чем у спутников GPS, орбиты, на широте Полярного круга будет обеспечена точность до одного метра.
2.4. Система Бэйдоу (BeiDou). Бэйдоу – спутниковая система навигации КНР. На 26 октября 2012 года включала в себя 16 спутников, расположенных на геостационарной орбите, и обеспечивала определение географических координат в Китае и на соседних территориях. Планируется, что космический сегмент навигационной спутниковой системы Бэйдоу будет состоять из 5 спутников на ГСО и 30 спутников на орбитах, отличных от ГСО. Планируется, что на полную мощность система выйдет к 2020 году после урегулирования вопросов, касающихся частотных диапазонов, с российской, американской и европейской сторонами.
В настоящее время система работает на частоте сигнала B1 (отмеченной Евросоюзом как E2) с частотой 1559,052– 1591,788 МГц; согласовывается вопрос наложения специальных сигналов системы Compass на специальные сигналы PRS системы Galileo (диапазон L1, центральная частота 1575,42 МГц). Предположительно, система будет работать в частотных диапазонах B2: 1166,22–1217,37 МГц и B3: 1250,618–1286,423 МГц.
2.5. Сравнительные характеристики GPS и ГЛОНАСС. Основное отличие системы ГЛОНАСС от системы GPS в том, что спутники ГЛОНАСС в своем орбитальном движении не имеют резонанса (синхронности) с вращением Земли,
что обеспечивает им большую стабильность. Таким образом, спутники ГЛОНАСС не требуют дополнительных корректировок в течение всего срока активного существования. В то же время срок службы спутников ГЛОНАСС заметно короче.
В настоящее время точность определения координат системой ГЛОНАСС несколько отстает от аналогичных показателей для GPS. Согласно данным Российской системы дифференциальной коррекции и мониторинга, на 22 июля 2011 года ошибки навигационных определений ГЛОНАСС составляли 4,46–7,38 м при использовании в среднем 7–8 спутников, а ошибки GPS – 2,00-8,76 м при использовании в среднем 6–11 спутников (в зависимости от точки приема). Предполагается к 2020 году повышение точности ГЛО-НАСС до 80 сантиметров, а GPS – до 50.
В то же время в приполярных областях планеты качество приема сигнала от спутников GPS серьезно ухудшается вследствие невысокого наклонения их орбит. Система ГЛО-НАСС этого недостатка не имеет, поскольку рассчитывалась с учетом использования на Севере России.
Надо отметить, что совместное использование навигационных систем даёт существенный прирост точности определения требуемых параметров.
3.Режимы поиска спутниковых сигналов приемной навигационной аппаратурой
ПНА осуществляет поиск спутниковых сигналов НСС в одном из трех режимов: «холодный старт», «теплый старт», «горячий старт» — в зависимости от наличия в ПРМн информации о спутниках НСС: данных альманаха (общие данные о параметрах орбиты навигационных спутников), которые действительны в течение 30 суток, и данных эфемериса (уточняющие данные альманаха для конкретного спутника в конкретный момент времени), действительных в течение 30 минут.
3.1. Холодный старт. В памяти ПРМн отсутствует информация о спутниках (номера спутников, данные эфемериса и альманаха). В этом случае ПРМн сканирует частотный диапазон в поисках сигналов. Этот процесс включает в себя поиск, декодирование сигналов и проведение расчетов и может занимать от 5 до 20 минут. Точная продолжительность зависит от ряда факторов, включая количество видимых спутников и алгоритм поиска, реализованный в данной модели.
В общем случае алгоритм поиска может быть представлен следующим образом:
– установление связи с первым из найденных спутников;
– получение и сохранение данных альманаха;
– получение и сохранение данных эфемериса;
– установление связи еще с тремя спутниками, получение от них и сохранение данных эфемериса;
– вычисление координат по полученным данным о местоположении спутников и эфемериса.
3.2. Теплый старт. В памяти ПРМн содержатся данные альманаха, данные эфемериса отсутствуют или устарели.
Алгоритм поиска в этом режиме может быть представлен следующим образом:
– установление связи со спутниками;
– получение и сохранение данных эфемериса;
– вычисление координат.
3.3. Горячий старт. В памяти ПРМн содержатся данные альманаха и данные эфемериса. В данном случае алгоритм поиска состоит в установлении связи со спутниками и вычислении координат.
О методе расчета эффективности работы модуля (метод дискретной эффектометрии)
Как отмечалось, поставленная задача может быть решена системными методами. Одним из таких методов является метод дискретной эффектометрии [3], основанный на системном подходе, который состоит в описании задачи, определении показателей объекта, представляющих интерес с точки зрения выполнения объектом поставленной цели, присвоении показателям соответствующих весовых коэффициентов. Далее определяются значения показателей и рассчитываются величины эффективности. Полученные результаты расчета сравниваются между собой, вариант с максимальной величиной эффективности является оптимальным.
Предлагаемый метод позволяет проводить расчет и последующее сравнение величин эффективности вариантов построения различных систем, проводить сравнение эффективности работы системы во времени, определять величину эффективности работы эксплуатируемой системы по отношению к ее гипотетическому, наихудшему варианту (если бы все показатели системы имели наихудшее значение) и т. п. Метод также предполагает, используя теорию нечетких множеств [4], возможность трансформации качественных значений параметров системы в количественные, что является достаточно важным, поскольку на практике количественную оценку отдельных параметров некоторых объектов получить весьма затруднительно. При трансформации чаще всего используется шкала от 0 до 4, где значению «0» соответствует оценка «очень хорошо», значению «1» – «хорошо», «2» – средне, «3» – «плохо», «4» – «очень плохо».
Кроме того, каждый из показателей имеет, как правило, свою размерность и свой диапазон значений. В то же время их числовые значения должны совместно учитываться при расчете сравнительной эффективности. Эти соображения приводят к необходимости преобразования каждого показателя в коэффициент, представляющий собой относительную величину, изменяющуюся в интервале [0;1] и характеризующую уровень успешности «своего» показателя. Такой коэффициент называется «коэффициент успеха», обозначается η и определяется соотношениями:
ηi=1-α I мин /α I; ηi =1-αI /α iмакс , (1)
где α i мин ,α iмакс – минимальная, максимальная (но всегда наихудшая) величина i-го показателя; αi – текущее значение i-го показателя.
В общем случае, когда в описываемой модели нет особенностей, требующих специального подчеркивания, расчет эффективности проводится по формуле:
γ = ∑ βi∙ ηi ,(2)
где γ – величина интегральной эффективности объекта, βi – весовой коэффициент i-го показателя объекта, ηi– коэффициент успеха i-го показателя.
Достаточно часто для описания объекта необходимо использовать несколько функционально близких показателей (например, мощность потребления, напряжение питания и т. п.); такие показатели целесообразно объединить в группу; при этом расчет эффективности проводится по следующей формуле:
γ = ∑ βi ∙ ηi + ∑ βj ∙ γj, (3)
где γ – величина интегральной эффективности объекта, γj – величина эффективности группы функционально близких показателей, βj – весовой коэффициент j-го показателя в составе группы, ηi – коэффициент успеха i-го показателя, не имеющего группы, βi – весовой коэффициент i-го показателя.
Более подробно методика расчета эффективности системы рассмотрена в работе [5].
Показатели модулей приемников навигационной информации
- Определение подлежащих расчету показателей. Большинство технических устройств, как отмечалось, характеризуется тремя группами параметров: технической, конструктивно-экономической и эксплуатационно-потребительской [3].
В настоящем разделе рассматриваются показатели, характеризующие работу модулей, рассчитывается величина эффективности каждой группы показателей и эффективность работы каждого модуля; полученная в результате расчета информация позволяет определить причины большей или меньшей эффективности того или иного модуля.
В данной статье весовые коэффициенты выбирались исходя из усредненных требований на изделия, подлежащие государственному контролю и регулированию. По этой причине параметры «наличие сертификата на средство измерения» и «российское производство» получили повышенный вес. Естественно, пользователь может назначить свои весовые коэффициенты для тех или иных показателей, более точно определяемые конечным изделием. Например, для носимого прибора с аккумулятором небольшой емкости наиболее весомым может стать потребляемый ток в режиме навигации, для автомобильной «закладки» – потребляемый ток в режиме поиска и время холодного старта, для автомобильного трекера – цена, для прибора мониторинга уборочной и специальной техники – точность определения местоположения.
Показатели формируются на основе параметров, приведенных на сайтах разработчиков и изготовителей [6]: ML8088sE, ML8090F, ГеоС-3М (Россия), MAX-M8Q, NEO-M8N (Швейцария), SIM68E, SIM68M, Gmm-g3, REB1315S5 (Китай), GNS2301 (Германия). Используемые для определения эффективности модулей параметры (показателиα) и их группы, а также весовые коэффициенты β приведены в табл. 1.
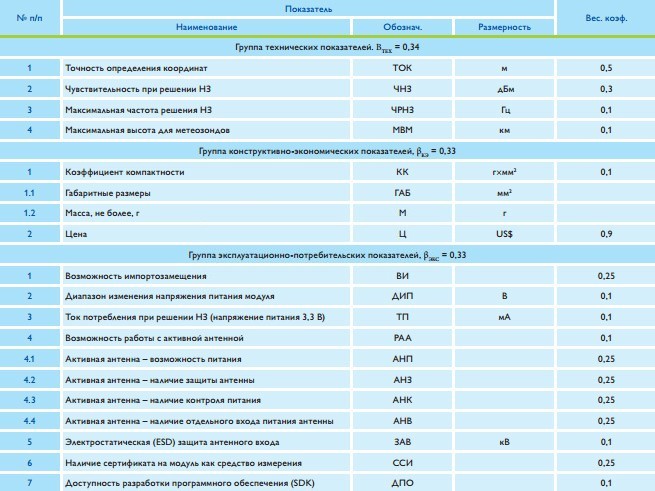
Таблица 1. Показатели эффективности работы модулей
- Расчет эффективности работы модулей. Расчет эффективности работы модулей проводится в соответствии с соотношениями (1–3) и разделом 3 настоящей работы. Ниже представлены развернутые соотношения (4–8), где γТЕХ, γКЭ,γЭКС – величины эффективности технической, конструктивно-экономической, эксплуатационно-потребительской групп, γРАА– величина эффективности работы с активной антенной, γМn– эффективность работы n-го модуля.
γТЕХ = 0,5×ηТОК + 0,3×ηЧНЗ + 0,1×γЧРНЗ +0,1×ηМБМ (4)
γКЭ = 0,1×ηКК +0,9×ηЦИП (5)
γЭКС= 0,25×ηВИ+ 0,1×ηДИП+0,1×ηТП+0,1×γРАА+0,1×ηЗАВ+ 0,25×ηССИ+ 0,1×ηДПО (6)
γРАА= 0,25×η АНП+ 0,25×ηАНЗ+ 0,25×ηАНК+ 0,25×η АНВ(7)
γМn= βТЕХ× γТЕХ+ βКЭ× γКЭ+ βЭКС× γЭКС= = 0,34 × γТЕХ+ 0,33 × γКЭ+ 0,33 × γЭКС (8)
Результаты расчета эффективности групп показателей приведены в табл. 2–5, а эффективности работы каждого модуля – в табл. 6.
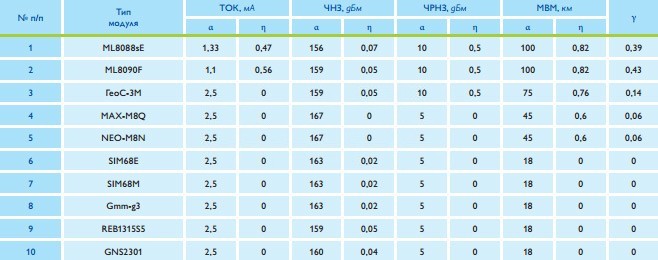
Таблица 2. Группа технических показателей
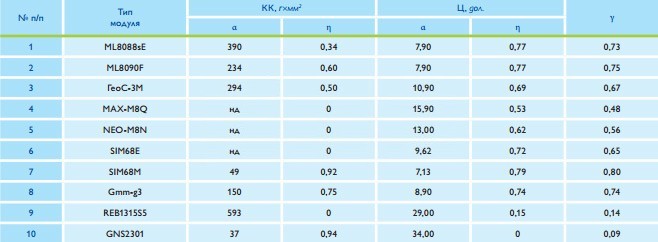
Таблица 3. Группа конструктивно-экономических показателей
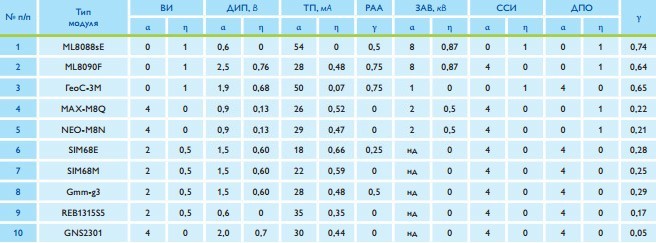
Таблица 4. Группа эксплуатационно-потребительских показателей
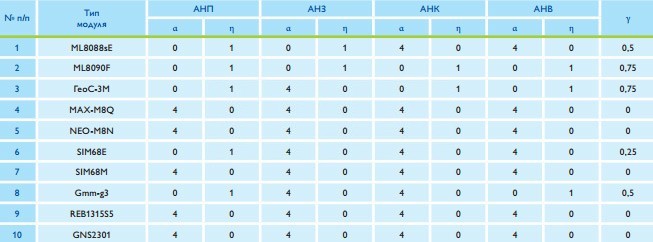
Таблица 5. Подгруппа показателей РАА
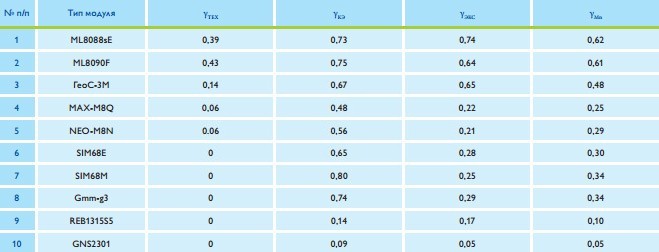
Таблица 6. Эффективность работы модулей
Анализ информации, приведенной в таблицах, показывает, что модуль ML8088sE обладает наилучшей эффективностью работы, несмотря на то, что модуль ML8090F несколько превосходит его по техническим характеристикам; однако он пока не имеет сертификата, что отрицательно сказывается на его эксплуатационно-потребительских показателях. Модуль ГеоС-3М проигрывает данным модулям по техническим характеристикам. Что касается западных и китайских образцов, то их невысокая эффективность определяется в основном отсутствием сертификата и сложностью импортозамещения, несмотря даже на хорошие технические характеристики некоторых моделей.
Заключение
В заключение надо отметить, что предлагаемый подход носит общий характер, позволяя оптимизировать решение различных многопараметрических задач, выбирая наиболее эффективный вариант из рассматриваемых (в данном случае наиболее эффективно работающий модуль). Возможность анализа полученных результатов позволяет определить узкие места в том или ином изделии и тем самым сориентировать разработчика на их устранение.
Данная методика может также служить основой для выбора применяемых при разработке элементов – также путем проведения сравнительного анализа (например, при выборе чипа, на базе которого разрабатывается модуль); в этом случае потребуются характеристики сравниваемых элементов, а также сведения по их эксплуатационным характеристикам.
И, наконец, предлагаемый метод позволяет периодически проводить «технический аудит» эксплуатируемого устройства – расчеты эффективности работы устройства через определенные промежутки времени, что позволяет прогнозировать работоспособность и конкурентоспособность устройства.
Литература
- Р 50.1.031–2001. Рекомендации по стандартизации. Информационные технологии поддержки жизненного цикла продукции. Терминологический словарь. Часть 1. Стадии жизненного цикла продукции. Издание официальное. Госстандарт России. М. 2001.
- Современная Гуманитарная Академия. Общие понятия систем, признаки, свойства, классификация. Википедия. Электронный ресурс. URL: http://www.standard-company.ru/standard-company6.shtml
- Калужский А.Д. Некоторые вопросы эффективности работы эргатических и потребительских систем. «Качество. Инновации. Образование», № 4, 2013, С. 52–62.
- Заде Лотфи А. Основы нового подхода к анализу сложных систем и процессов принятия решений. Сб. статей «Математика сегодня», пер. с англ. «Знание», 1974 г., стр. 5–48.
- Калужский А.Д. Каталогизация изделий: вопросы сопоставительного анализа. «Качество. Инновации. Образование», № 6, 2011 г., С. 67–75.
- Сайты разработчиков и изготовителей навигационных модулей URL: http://naviaglonass.ru/product/ml8088s/,
http://naviaglonass.ru/product/ml8090f/
http://geostar-navigation.com/navigation_01.html
http://www.u-blox.com/en/gps-modules/pvt-modules/maxm8-series-concurrent-gnss-modules.html
http://w w w.u-blox.com/en/gps-modules/pv t-modules/neo-m8.html
http://wm.sim.com/producten.aspx?id=1072
http://wm.sim.com/producten.aspx?id=1069
http://w w w.gtop-tech.com/en/product/Gmm-g3–GPSGLONASS Module/GPS_Modules_Gmm-g3.html
http://www.royaltek.com/solutions/?CId=1
http://www.gns-gmbh.com/index.php?id=265&L=1
- Современный толковый словарь русского языка. СПб., Изд. «НОРИНТ», 2005, 960 с.
